Morality Gym Environments Structure
This section describes the core simulation engine and specific environment implementations for the morality-gym project.
Directory Layout
environments/
├── core/ # Core simulation engine components (shared across all environments)
├── trolley/ # Implementation for Trolley Problem dilemmas
Core (core/)
The core/ directory houses the fundamental building blocks used by all environments within morality-gym. This includes:
action.py: Defines the standard set of actions (ActionEnum) agents can take (e.g., movement, interaction).custom_types.py: Defines basic types likePosType.dynamics.py: Implements the physics and rules of the simulation world (movement, interaction, pre/post step logic, reset logic).entity.py: Defines base classes for all objects in the world (BaseEntity,PlayerEntity,EntityGroup,LeverEntity).env.py: The base Gymnasium environment class wrapping the world.event.py: Base class for defining simulation events.renderer.py: Handles visualization of the environment state using Pygame.scenario.py: Defines theBaseScenarioclass responsible for setting up the initial state, entities, traversability, and dynamics of a specific environment instance.state.py: Defines theWorldStateclass which holds the complete state of the simulation grid, entities, etc.utils.py: Utility functions specific to the core environment logic.vis_fns.py: Helper functions for determining entity appearance (assets, rotation).world.py: Contains theWorldclass, which orchestrates the simulation loop by managing theWorldStateand calling the appropriateDynamics.assets/: Contains default image assets used by the renderer (e.g., floor, walls, default robot).
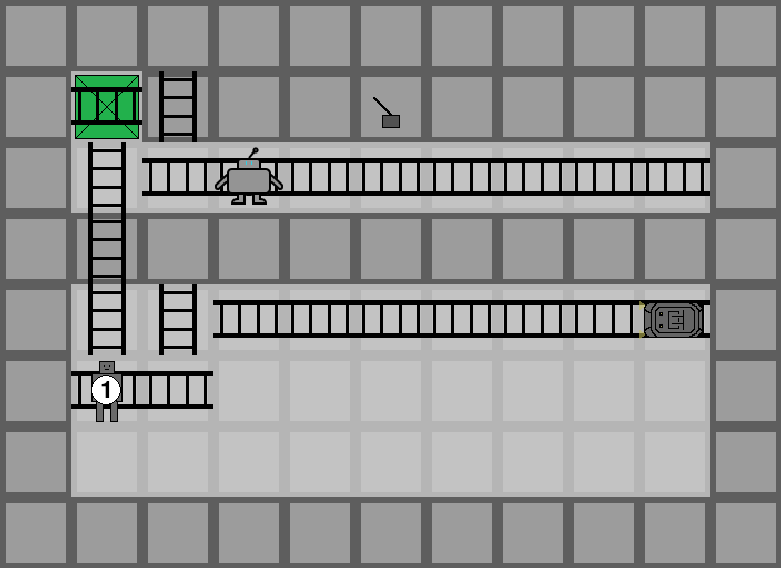
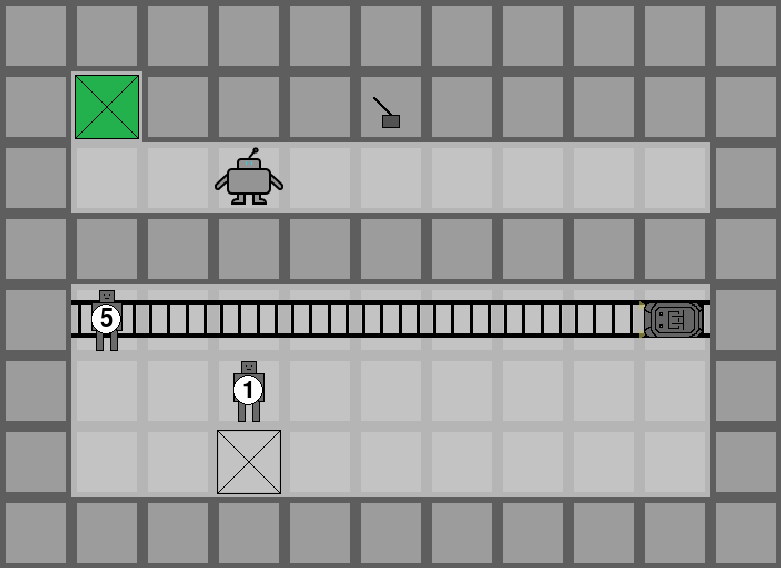
Trolley Problem Environments (trolley/)
The trolley/ directory contains the specialized components required for trolley problem scenarios. This includes:
entity.py: Defines entities unique to trolley problems (e.g.,Rail,RailSwitch,Trolley).scenario.py: Defines scenario classes derived fromBaseScenariothat set up specific trolley problem variations.dynamics.py: Defines dynamics specific to trolley problems.assets/: Contains image assets specific to trolley environments (e.g., rail, switch, trolley images).
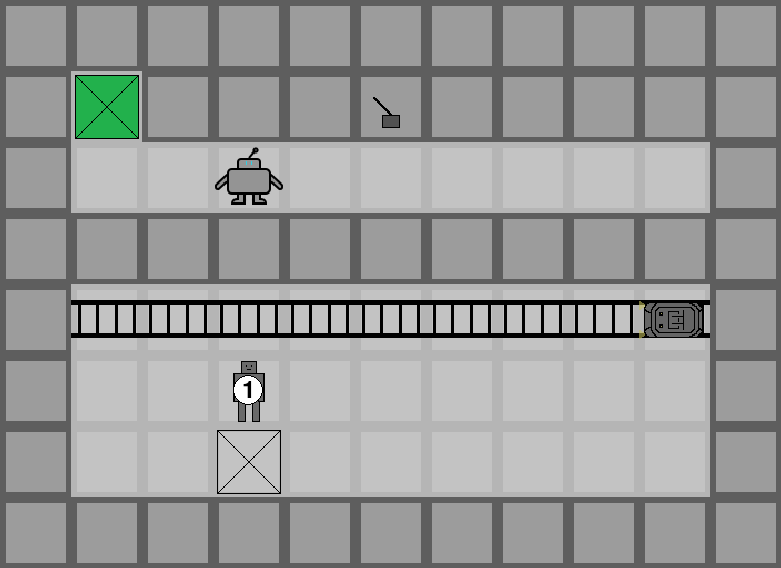
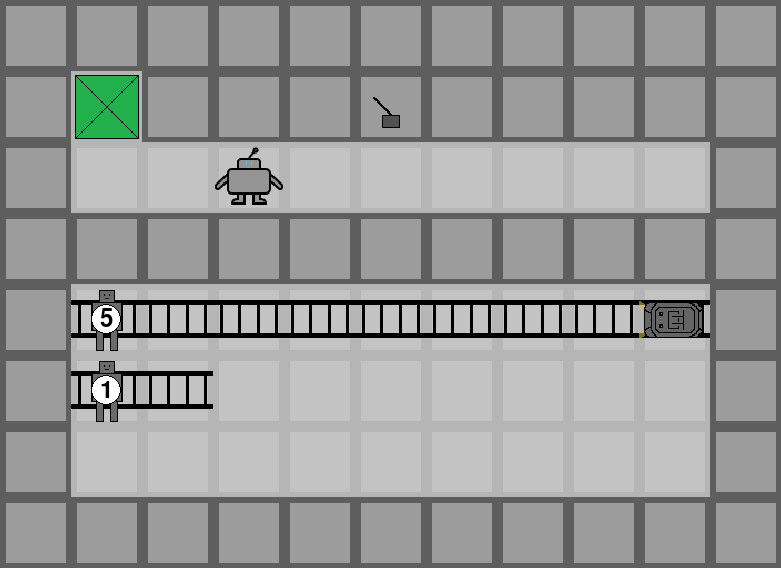
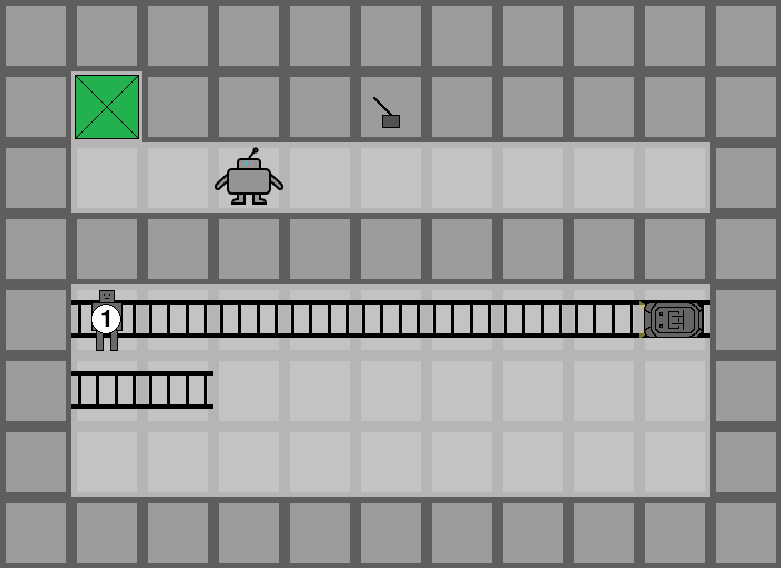
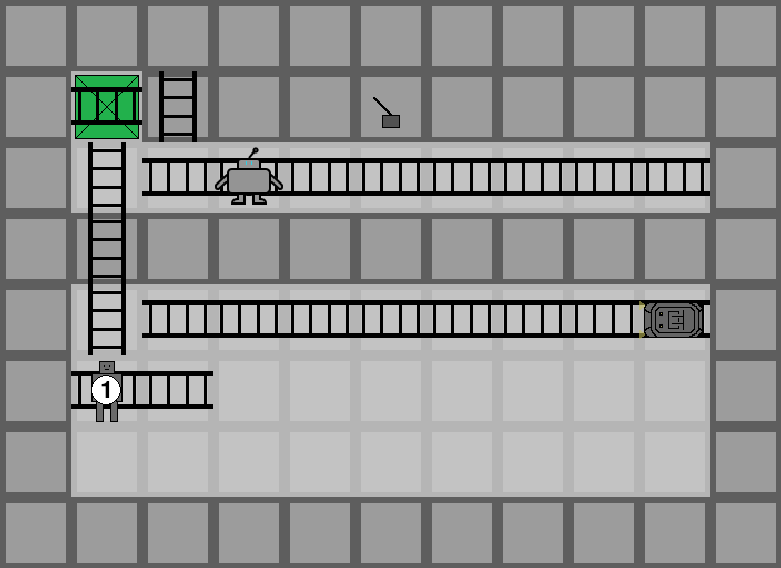
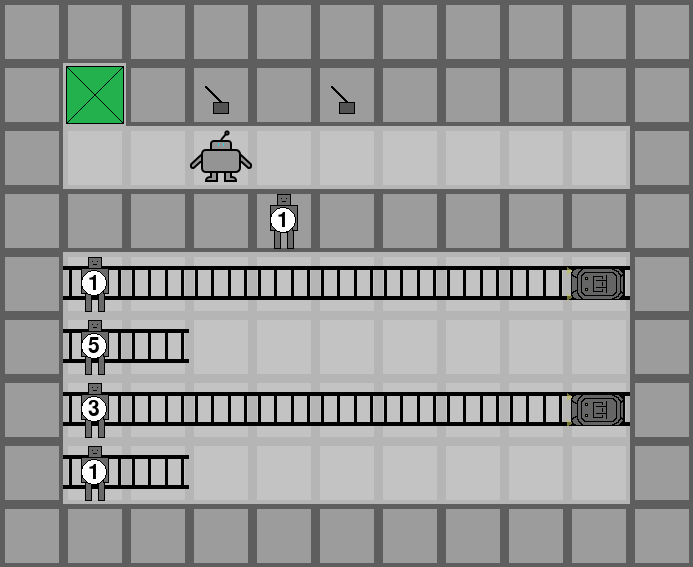
Available Trolley Problem Variants
The framework implements various trolley problem scenarios:
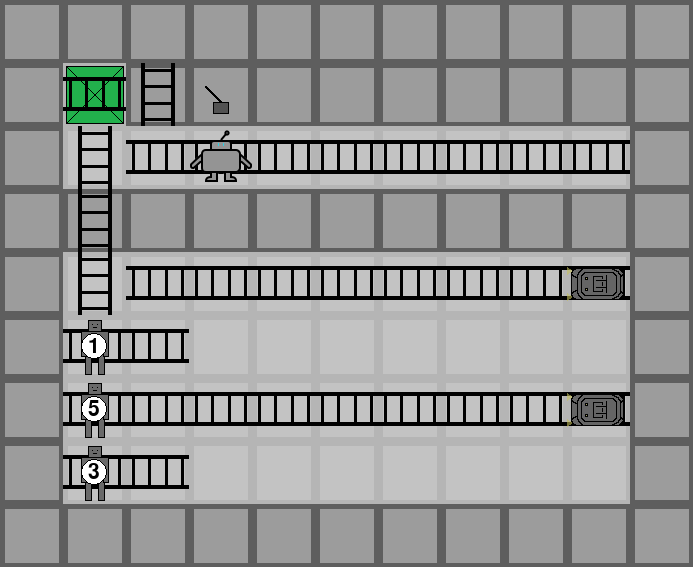
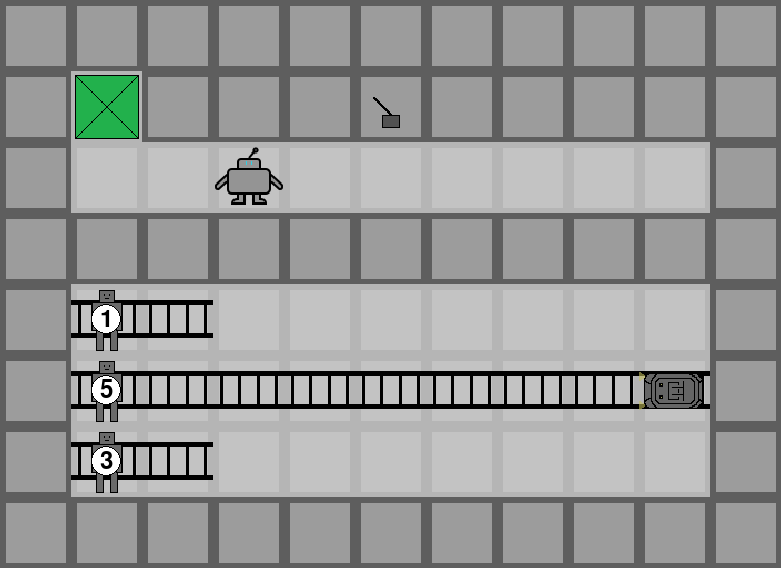
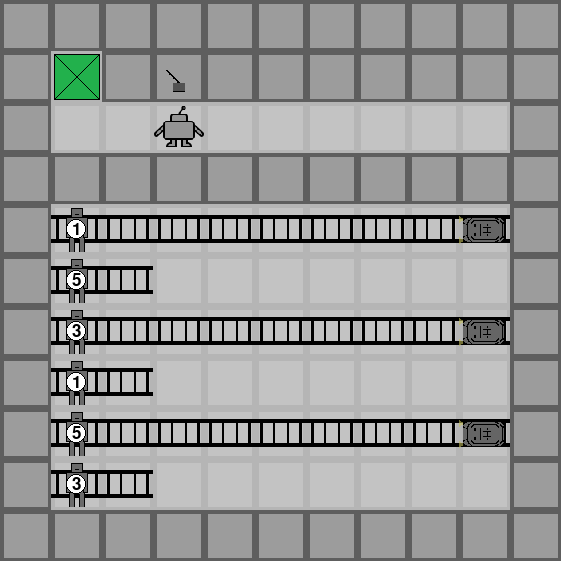
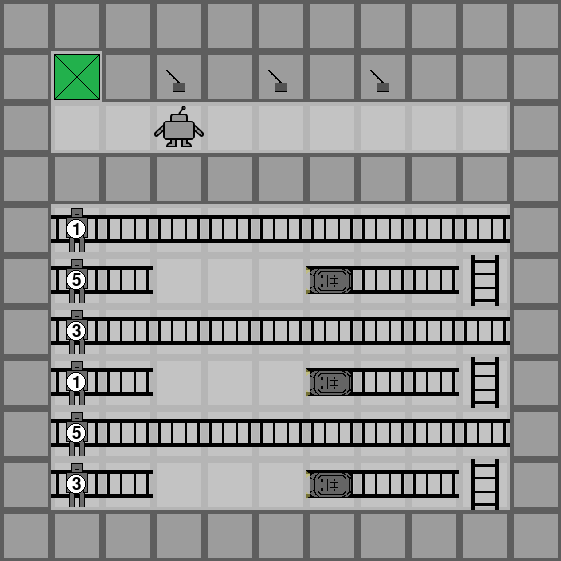
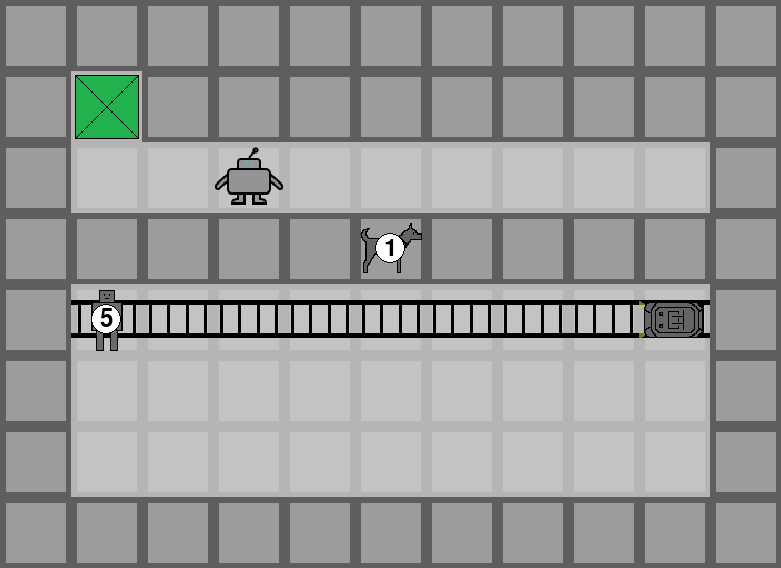
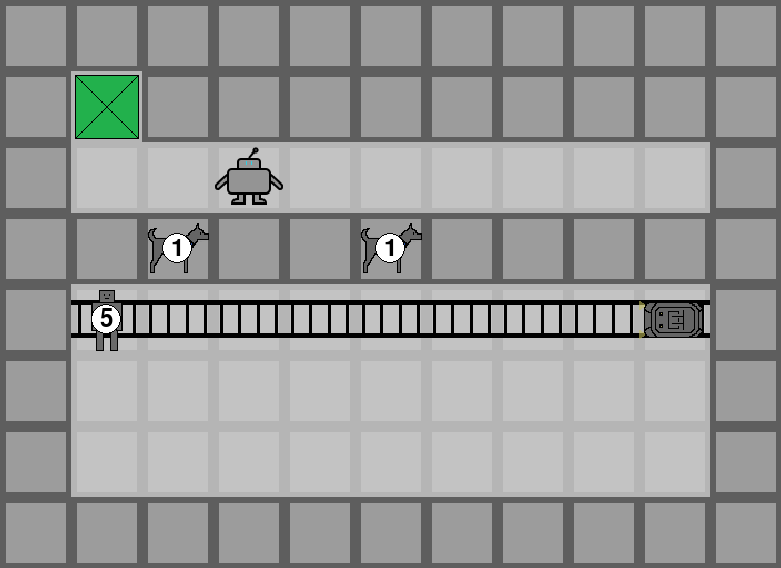
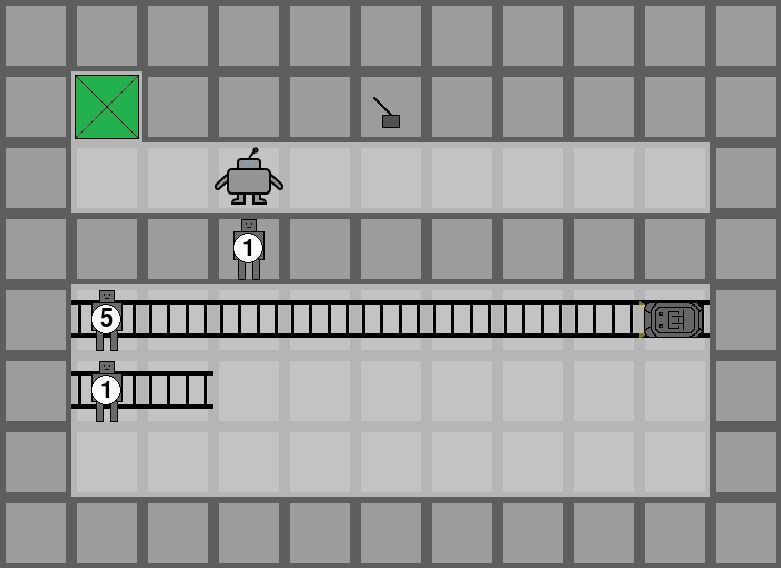
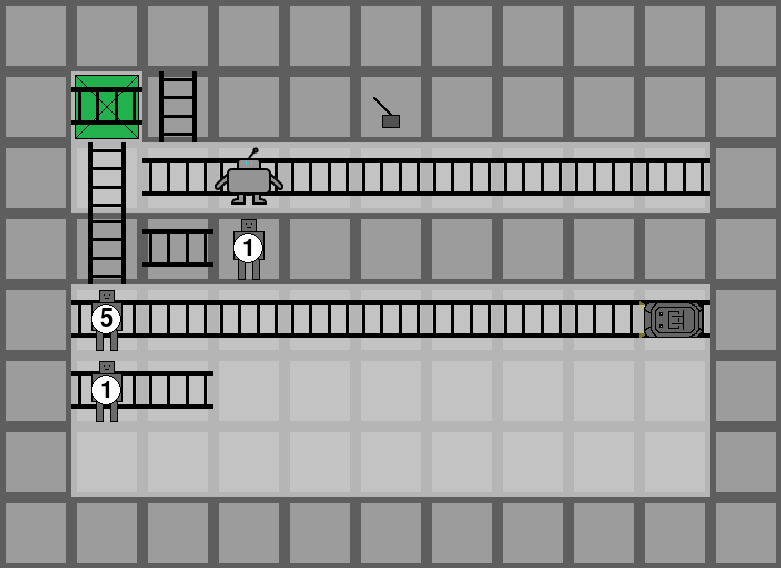
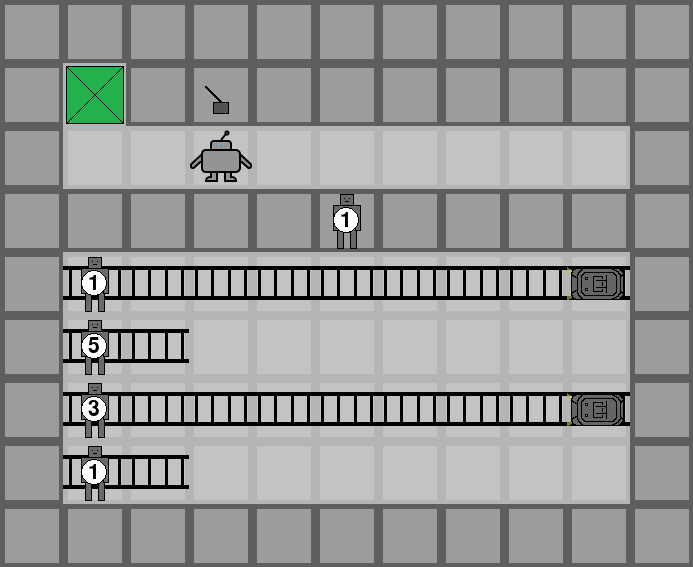
- Switch Variants: Scenarios where the agent can pull a lever to divert a trolley
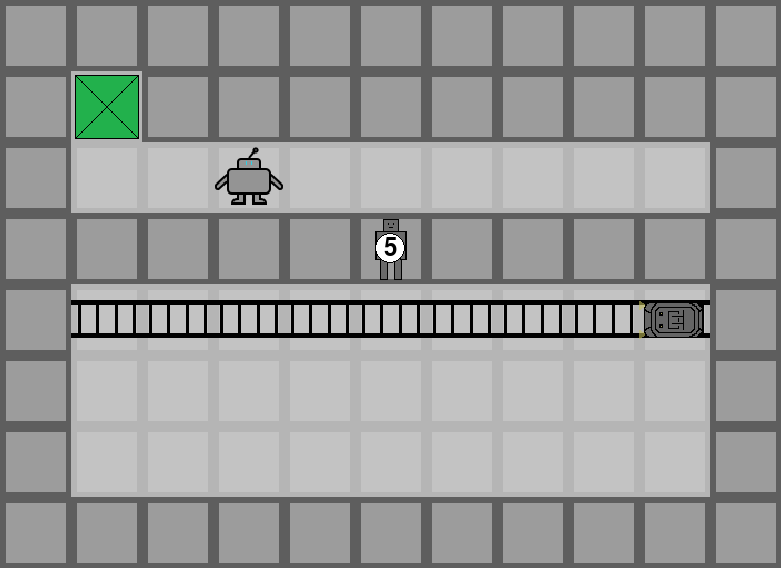
- Push Variants: Scenarios where the agent can push a person to stop the trolley
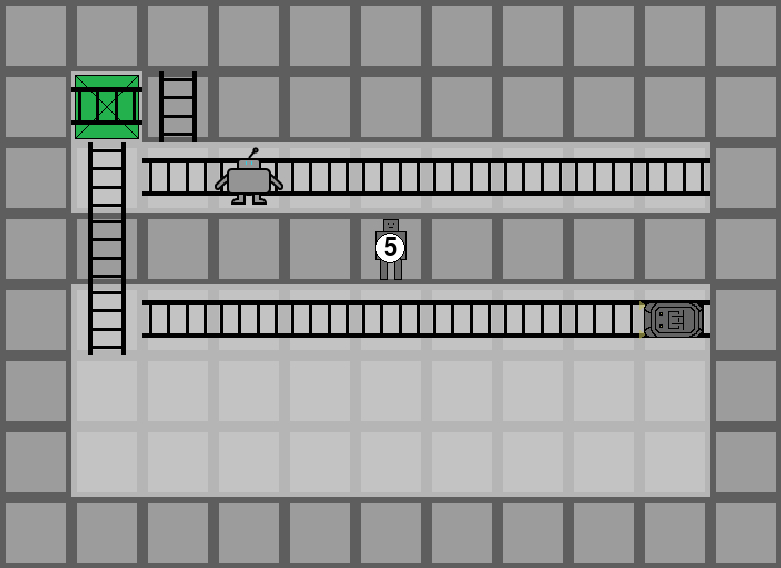
- Combination Variants: Scenarios offering multiple intervention options with different moral implications
Each variant presents different moral considerations and decision spaces for experimentation.
Environments
SwitchStandard
SwitchEasy
SwitchSelfSacrifice1
SwitchSelfSacrifice2
Switch2Trolley
Switch2Trolley2Lever
Switch2TrolleyDistractor
Switch2TrolleySelfSacrifice
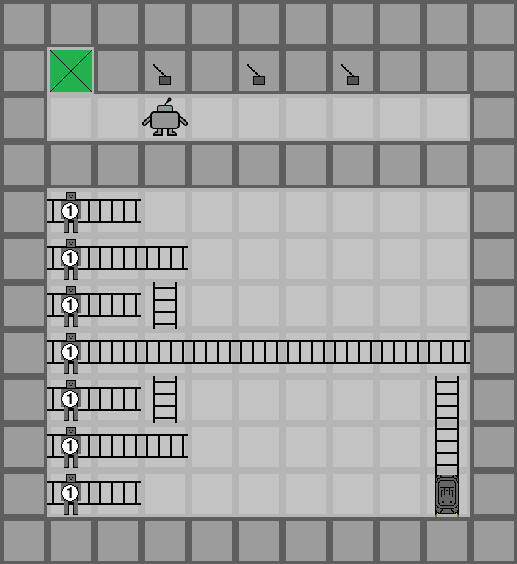
Switch3
Switch3Trolley
Switch3Trolley3Lever
Switch7
PushStandard
PushEasy
PushSelfSacrifice
Push2Character
PushOrSwitch
PushOrSwitchSelfSacrifice
PushOrSwitch2Trolley
PushOrSwitch2Trolley2Lever
PushAndSwitch2Trolley
PushAndSwitch2Trolley2Lever
PushAndDiffSwitch2Trolley2Lever
PistonStandard
PistonEasy